In Spring 2017, I took ARC596 Embodied Computation, a graduate seminar, with Professor Axel Kilian in the Princeton School of Architecture.
Computational design is often presented as a problem solving tool for design implementation rather than as an integral part of design conceptualization and exploration. This seminar focuses on approaching computational design from the conceptual design direction extending existing or defining novel models of design along the way. A strong emphasis is put on prototyping as a mode of design iteration using both computational prototypes and computationally generated physical prototypes as embodiments of the design process.
The course was very research oriented and required the development of a design experiment, followed by the definition of a model, and then the creation and testing of a physical embodied computation prototype.
I was interested in the exploration of evolutionary design and the role that ML algorithms might play in defining our architectural spaces.
Abstract
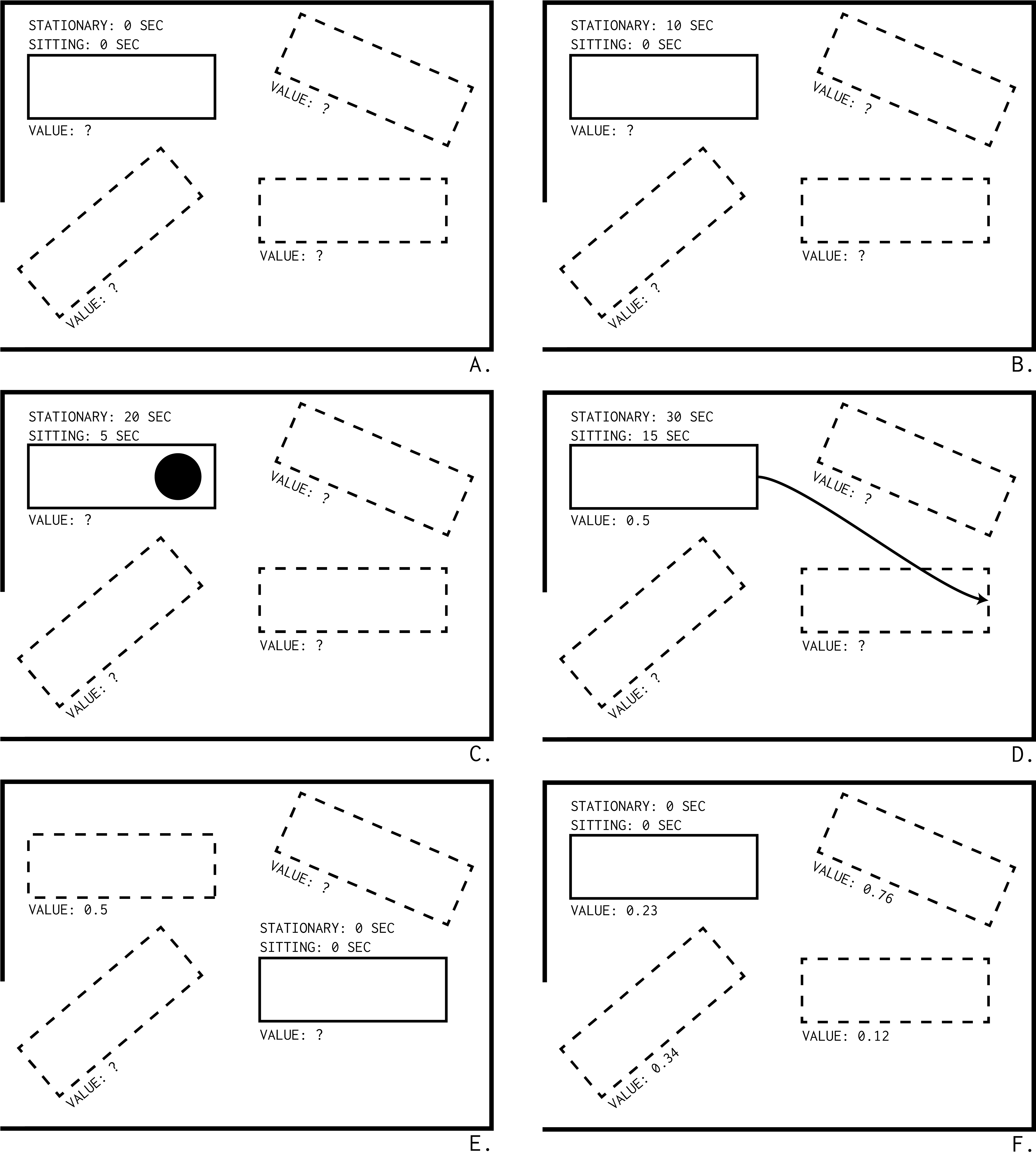
Current implementations of computational design in architecture are often spatially present, but rarely evolve their behavior beyond a simple response mechanism, if any. We are interested in creating a bench that not only reacts to its environment, but evolves its behavior and location as a result of these interactions. Specifically, we are interested in how a bench can evolve its relationship with its occupants and the space it occupies. To do so, we developed a model using vibration for interfacing with occupants, as well a model using position and orientation for interfacing with its space. For each of the models, we explore applying the output to a multi-armed bandit problem so that its responses are constantly evolving. Physical prototyping led us to understand that vibrations were not effective to alert occupants, but physical movement of the bench was. While the current bench prototype is rather sparse, only including pressure sensors and motors, we would like to continue the work by utilizing other sensors (light, distance, temperature) as well as other evolution based algorithms such as contextual bandits.
Prototype Video

Testing of Various Sensors for Response
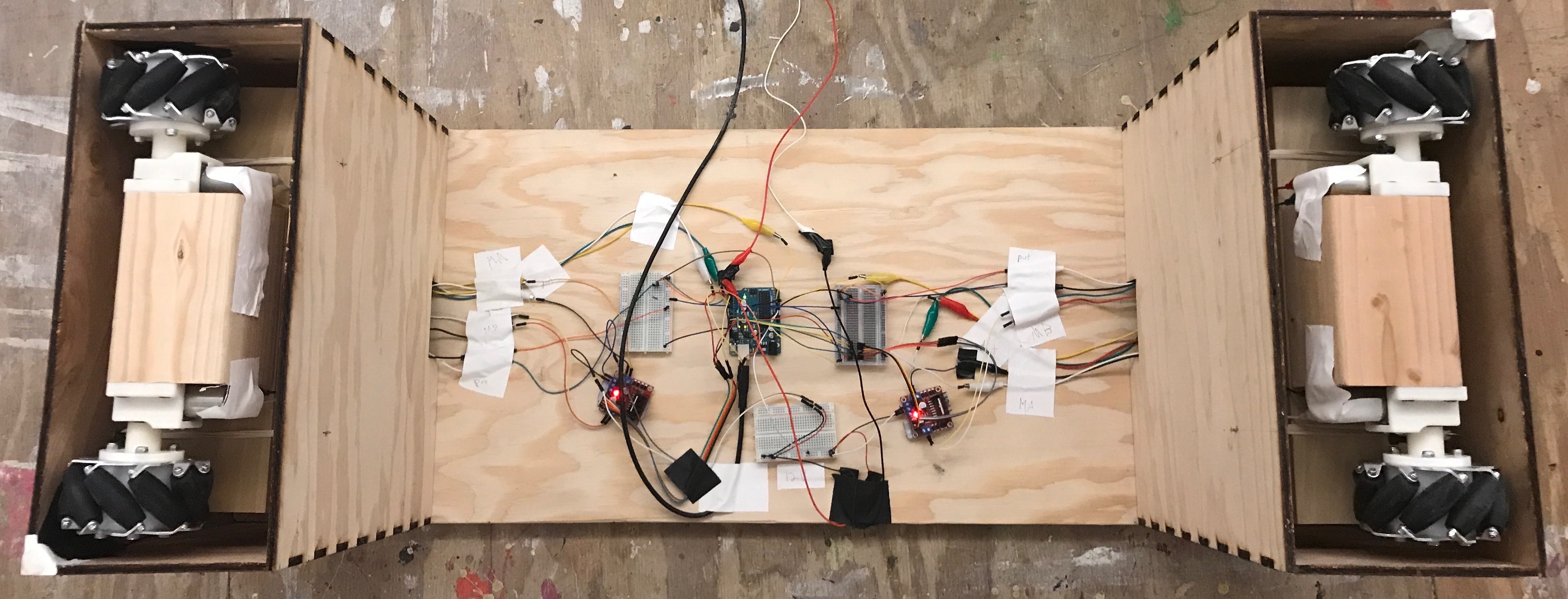
Axometric View of Prototype
Assembly of Prototype

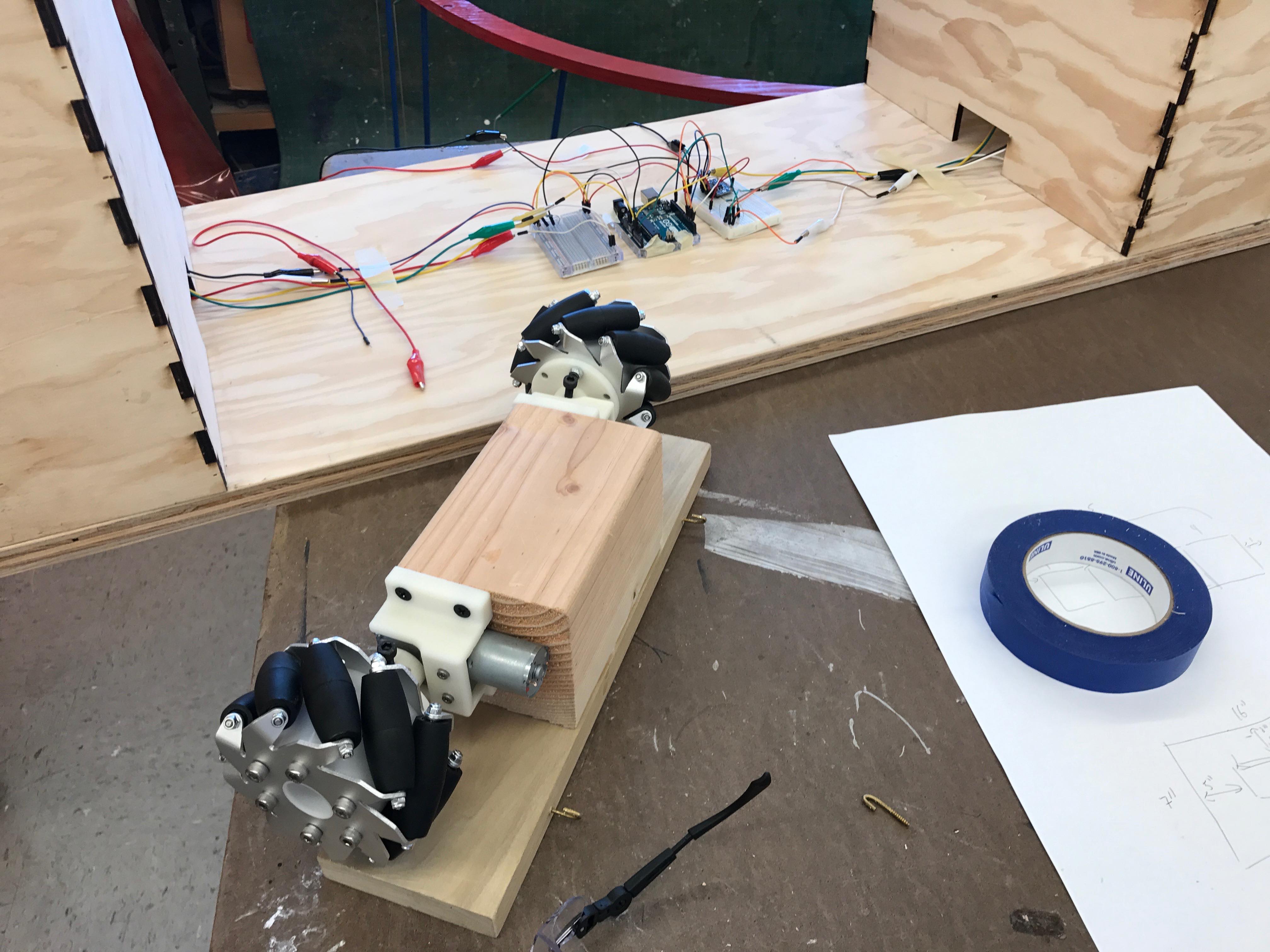
Side View of Prototype